选人形机器人关节模组,是不是搞不清楚各种类型的区别?其实,根据减速器的不同,关节模组主要分为行星关节模组、谐波关节模组和摆线关节模组三种类型。
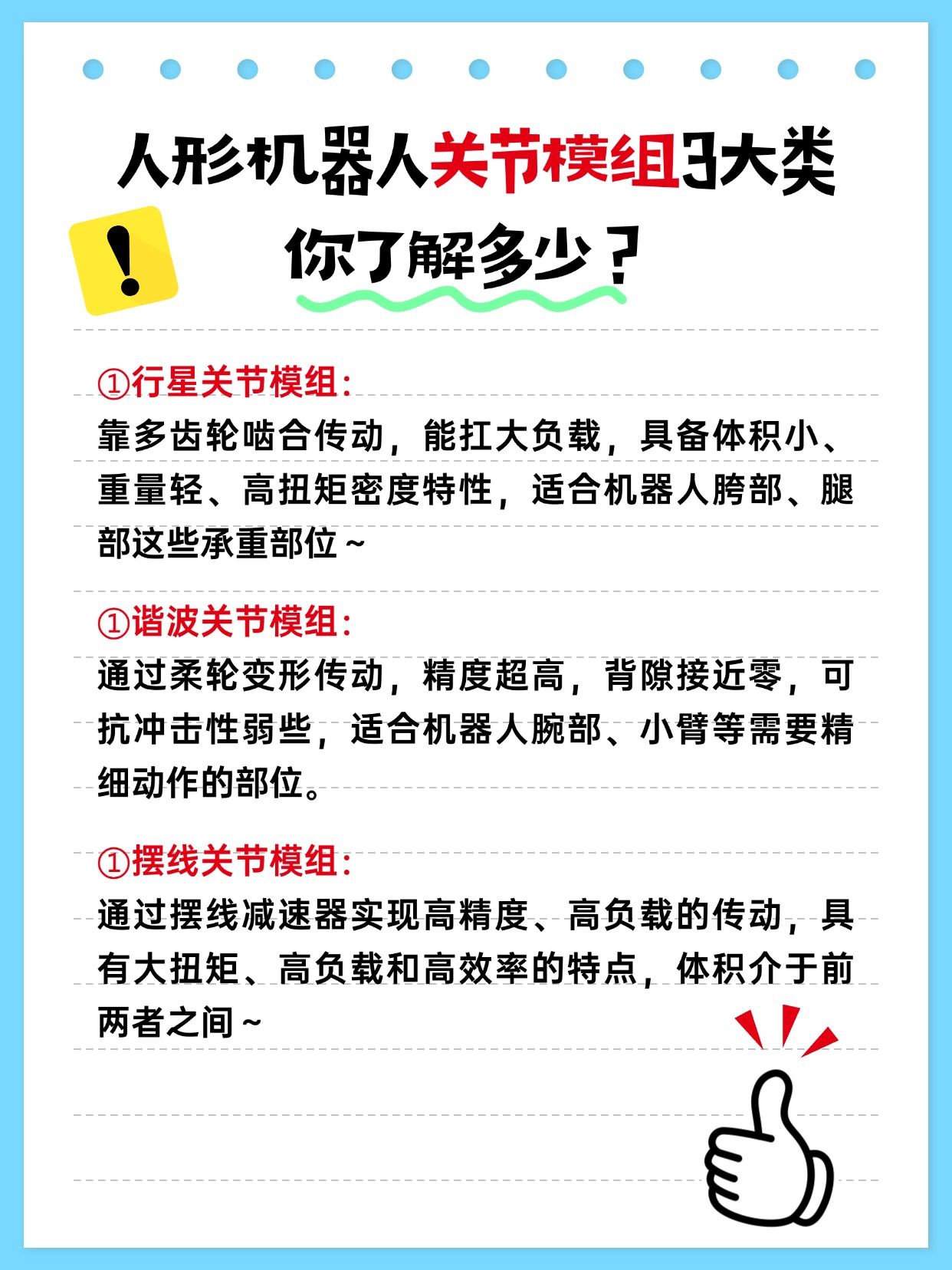
①行星关节模组:
靠多齿轮啮合传动,能扛大负载,抗冲击性强,具备体积小、重量轻、高扭矩密度特性,适合机器人胯部、腿部这些承重部位~
②谐波关节模组:
通过柔轮变形传动,精度超高,背隙接近零,可抗冲击性弱些,适合机器人腕部、小臂等需要精细动作的部位。
③摆线关节模组:
通过摆线减速器实现高精度、高负载的传动,具有大扭矩、高负载和高效率的特点,体积介于前两者之间~
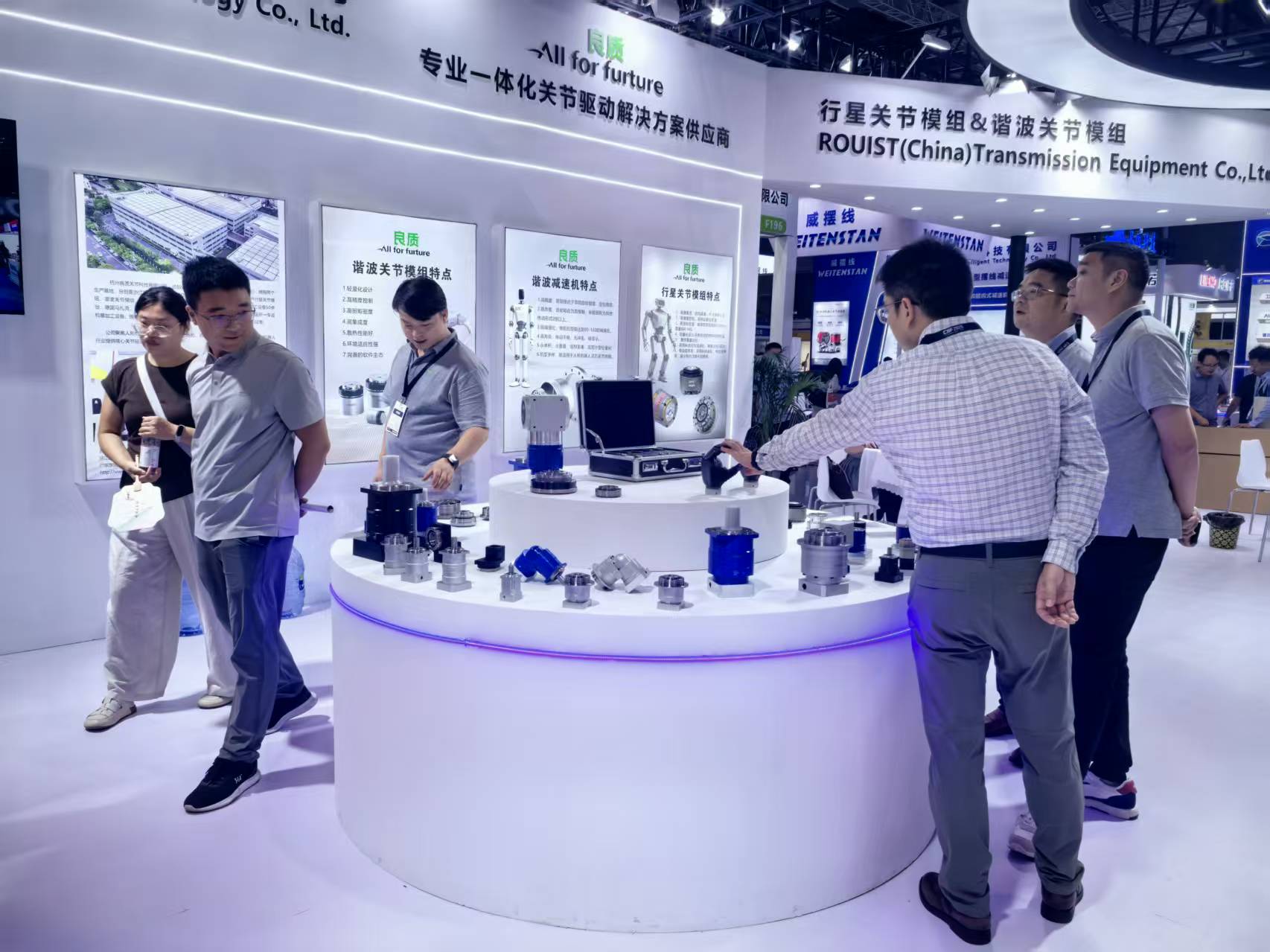
我们良质关节,一直致力于关节模组的研发生产,产品涵盖谐波关节模组、行星关节模组等,为人形机器人提供核心驱动解决方案��
以上这三类关节模组,只有按需选对类型,机器人才能更灵活!